
Die struktuur en werking van die Easytronic-transmissie
inhoud
Met die vrystelling van elke nuwe generasie motors stel vervaardigers al hoe meer innoverende tegnologieë in hul produkte in. Sommige van hulle verhoog die betroubaarheid van sekere motorstelsels, ander is ontwerp om die gemak tydens bestuur te verhoog. En nog ander word verbeter om maksimum aktiewe en passiewe veiligheid te bied vir almal wat in die motor is terwyl hulle bestuur.
Die motor se versending word ook deurlopend opgedateer. Motorvervaardigers probeer die ratskakeling, betroubaarheid van die meganisme verbeter en ook die werkstyd daarvan verhoog. Onder die verskillende modifikasies van die ratkas is daar meganiese en outomatiese (die verskil tussen outomatiese soorte uitsendings word breedvoerig bespreek in 'n aparte artikel).
Die outomatiese tipe ratkaste is hoofsaaklik ontwikkel as 'n onderdeel van die gemakstelsel, aangesien die meganiese analoog steeds sy taak perfek hanteer. Die belangrikste ding in hierdie geval is om nie foute te maak tydens die verwisseling van ratte nie (dit word breedvoerig beskryf in 'n ander resensie) en hou dit betyds in (lees, lees wat in hierdie prosedure vervat is) hier).

Die masjien skakel outomaties na 'n op / af-rat (die elektroniese beheereenheid kan die toestand van die motor op die pad bepaal op grond van 'n verskeidenheid sensors, waarvan die aantal afhang van die motormodel). Hierdeur word die bestuurder nie van die pad afgelei nie, hoewel dit nie 'n probleem vir 'n professionele persoon is om 'n spesifieke snelheid in te voer nie, ondanks die wisselboom. Om die motor te laat beweeg of stadiger te ry, hoef die bestuurder net die krag wat op die petrolpedaal uitgeoefen word, te verander. Die aktivering / deaktivering van 'n spesifieke snelheid word elektronies beheer.
Die beheer van enige outomatiese ratkas is so eenvoudig dat 'n bestuurskool in sommige lande 'n teken gee dat 'n nuwe bestuurder nie voertuie met 'n handrat kan bestuur nie.
'N Handratkas, of 'n robotkas, is ontwikkel as 'n soort outomatiese ratkas. Maar selfs onder robotte is daar verskeie wysigings. Een van die mees algemene tipes is byvoorbeeld DSG, wat ontwikkel is deur die ingenieurs van die VAG-onderneming (oor watter motors hierdie onderneming vervaardig, lees afsonderlik). Die toestel en kenmerke van hierdie tipe ratkas word beskryf in 'n ander artikel... 'N Ander mededinger van die oorweegse robot-oordragopsie is Ford se PowerShift-boks, wat breedvoerig beskryf word. hier.
Maar nou sal ons fokus op 'n analoog wat ontwikkel is in samewerking met Opel-Luk-ondernemings. Dit is Easytronic handratkas. Oorweeg die toestel, wat is die beginsel van die werking daarvan, en ook wat die werking van hierdie eenheid besonders maak.
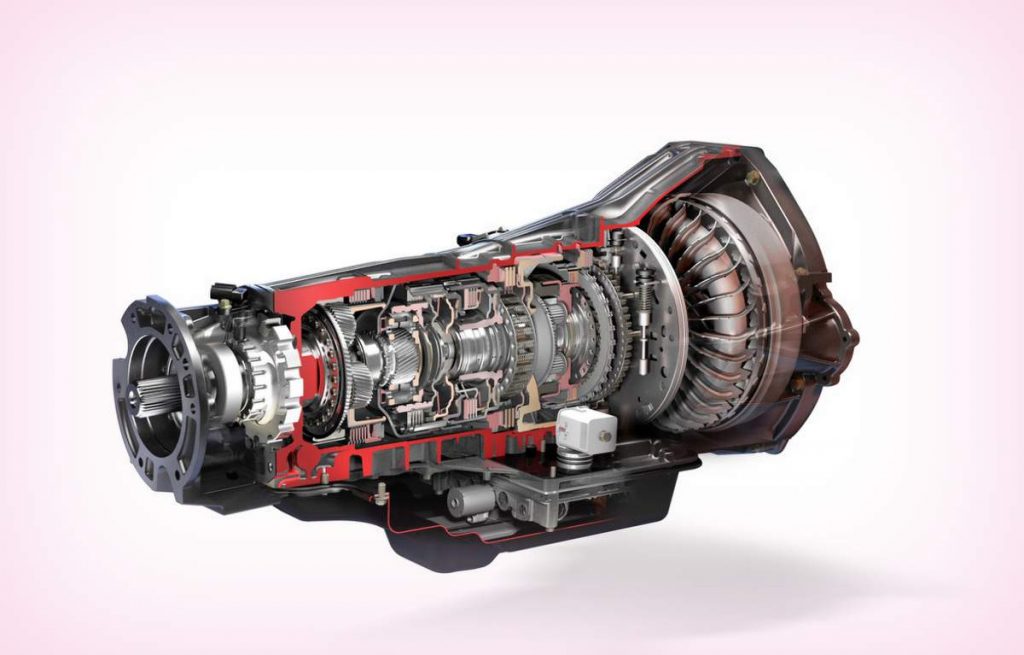
Wat is Easytronic-oordrag
Soos die DSG6- of DSG7-transmissie, is die Izitronic-transmissie 'n soort simbiose tussen outomatiese en handratkaste. Die meeste dele wat wringkrag van die krageenheid na die dryfwiele oordra, is dieselfde ontwerp as in klassieke meganika.
Die werkingsmeganisme self is ook amper identies aan die werking van die handratkas, slegs elke rat word aan / uitgeskakel, hoofsaaklik sonder die bestuurder se deelname - hy moet net die vereiste modus kies (hiervoor is daar 'n funksieskakelaar ), en druk dan net die gas of rem. Die res van die werk word deur elektronika gedoen.
Ons bespreek 'n bietjie later oor die voor- en nadele van hierdie oordrag. Kortom, baie motoriste, wat finansiële geleenthede kry, kies hierdie tipe, want dit kombineer die gemak van 'n outomatiese masjien met die betroubaarheid en ekonomie van werktuigkundiges.

Die belangrikste verskil tussen 'n robot en 'n werktuigkundige is die afwesigheid van 'n koppelaarpedaal (die bestuurder het net gas en rem, soos in 'n outomatiese ratkas). Die funksie (die koppelaar word uitgedruk / losgelaat) is die verantwoordelikheid van die aandrywer, wat op elektrohydraulika werk. En die elektriese motor, wat deur die ECU beheer word, is verantwoordelik vir die beweging van die ratte en die keuse van die nodige ratte. Bestuurderaksies en verkeerstoestande is slegs insetdata wat deur die mikroverwerker verwerk word. Op grond van die geprogrammeerde algoritmes word die doeltreffendste ratskakelmoment bepaal.
Beginsel van werking
Voordat u oorweeg wat die werk van Easytronic is, is dit opmerklik dat die eenheid met dieselfde naam, maar in verskillende jare vrygestel is, effens van die ouer analoog kan verskil. Die rede is dat tegnologieë nie stilstaan nie - hulle is voortdurend besig om te ontwikkel. Met die bekendstelling van innovasies kan motorvervaardigers die lewensduur, betroubaarheid of sommige van die fynste aspekte van die werking van outomatiese stelsels, insluitend uitsendings, verhoog.
Nog 'n rede waarom vervaardigers voortdurend veranderinge aanbring in die toestel of sagteware van verskillende eenhede en meganismes van motors, is die mededingendheid van produkte. Hoe nuwer en beter die produk, hoe groter is die kans dat dit nuwe klante lok. Dit geld veral vir aanhangers van verskillende nuwe produkte.
Die robot verskil van die klassieke outomatiese ratkas deur die breuk van trekkragte (vir 'n rukkie hou die wringkrag op van die motor na die as van die ratkas, soos in die meganika wanneer die koppelaar uitgedruk word) tydens die keuse en inskakeling van die toepaslike spoed, sowel as die oomblik dat die ry geaktiveer word. Baie motoriste is nie tevrede met die gebruik van 'n konvensionele outomatiese masjien nie, omdat dit dikwels laat werk of oorskakel as die enjin nog nie die toere bereik het waar die beste dinamika waargeneem word nie (ideaal, hierdie parameter kan slegs beheer word oor die meganika).
Dit is om hierdie rede dat 'n robotratkas ontwikkel is om werktuigkundiges sowel as outomatiese masjienliefhebbers tevrede te stel. Dus, soos ons opgemerk het, bepaal die robottransmissie onafhanklik die tyd wanneer dit nodig is om die toepaslike rat in te skakel. Kom ons kyk hoe die stelsel in twee beskikbare modusse sal werk: outomaties en semi-outomaties.
Outomatiese werking
In hierdie geval word die transmissie volledig elektronies beheer. Die bestuurder kies slegs die roete en druk in ooreenstemming met die situasie op die toepaslike pedaal: gas / rem. Tydens die vervaardiging van hierdie transmissie word die beheereenheid in die fabriek geprogrammeer. Terloops, enige outomatiese ratkas is toegerus met sy eie mikroprosessor. Elke algoritme word geaktiveer wanneer seine van verskillende sensors die ECU binnekom (die presiese lys van hierdie sensors hang af van die voertuigmodel).
Met hierdie modus kan die boks soos 'n gewone outomatiese analoog werk. Die enigste verskil is die ontkoppeling van die oordrag van die motor. Hiervoor word 'n koppelmandjie gebruik (lees vir inligting oor die toestel van hierdie meganisme in 'n ander resensie).
Hier is hoe die handratkas in outomatiese modus werk:
- Die aantal enjinsnelhede neem af. Hierdie funksie word toegeken aan die krukasposisiesensor (lees hoe lees hierdie instrument afsonderlik). In hierdie geval word die aantal omwentelinge van die krukas bepaal en die ooreenstemmende algoritme in die beheereenheid geaktiveer.
- Die koppelmandjie word uitgedruk. Op hierdie oomblik is die dryfas van die vliegwiel losgemaak (lees vir die funksies wat die vliegwiel in die motor verrig) hier) sodat die ooreenstemmende rat sonder skade gekoppel kan word.
- Op grond van die seine wat die beheereenheid van die onderstel, gasklep- of gaspedaalposisiesensors en ander sensors ontvang, word bepaal watter rat ingeskakel moet word. Op hierdie punt word 'n geskikte rat gekies.
- Sodat skokbelasting nie gegenereer word tydens die koppeling nie (die dryfas en die aangedrewe as het dikwels verskillende rotasiesnelhede, byvoorbeeld, wanneer die masjien opdraand gaan, nadat die koppeling losgemaak word, vertraag die rotasiesnelheid van die aangedrewe as) sinkroniseerders word in die meganisme geïnstalleer. Lees vir meer inligting oor hoe hulle werk in 'n ander artikel... Hierdie klein meganismes verseker gesinkroniseerde draai van die aandrywing en aangedrewe as.
- Die ooreenstemmende spoed word geaktiveer.
- Die koppelaar word losgelaat.
- Die enjinsnelheid styg.

Dit is die moeite werd om daarop te let dat sommige algoritmes gelyktydig geaktiveer word. As u byvoorbeeld eers die enjin vertraag en dan die koppelaar druk, dan sal die enjin rem. Aan die ander kant, as die koppelaar by hoë toere ontkoppel word weens die gebrek aan las op die binnebrandenjin, sal die toere skerp tot die maksimum spring.
Dieselfde geld vir die oomblik wanneer die koppelingskyf aan die vliegwiel gekoppel is. Hierdie aksie en die toename in die spoed van die krageenheid moet sinchronies plaasvind. Slegs in hierdie geval is 'n gladde ratskakeling moontlik. Die werktuigkundiges het 'n identiese werkingsbeginsel, net al hierdie fases word deur die bestuurder uitgevoer.
As die motor lank klim, en die boks nie na semi-outomatiese modus oorgedra word nie, is dit moontlik om hierdie hindernis te oorkom, maar daar moet op gelet word dat die outomatiese spoed skakel, nie gebaseer op die las wat die motor ervaar nie, gebaseer op die krukasnelheid. Om die transmissie nie na 'n op / af-rat te skuif nie, moet u die gaspedaal twee derdes druk om die snelheid van die krageenheid op dieselfde vlak te hou.
Semi-outomatiese werkmodus
In semi-outomatiese modus sal die transmissie in byna dieselfde volgorde werk. Die enigste verskil is dat die bestuurder self die oomblik van oorgang na 'n spesifieke snelheid kies. Die teenwoordigheid van 'n semi-outomatiese ratkasbediening word bewys deur 'n spesiale nis op die moduskeuse.
Naas die hoofinstellings (ry, agteruitgang, neutrale modus, opsionele cruise control) is daar 'n klein venster waarin die rathefboom beweeg. Dit het net twee posisies: "+" en "-". Gevolglik posisioneer elkeen van die ratte op of af. Hierdie modus funksioneer volgens die beginsel van die Tiptronic outomatiese ratkas (lees hierdie verandering van die transmissie in 'n ander resensie). Om die spoed te verhoog / verlaag, moet die bestuurder die voertuig op die vereiste spoed bring en die hefboom na die gewenste posisie skuif.
Die bestuurder neem nie direk deel aan die beweging van die ratte nie, soos in die geval van 'n meganiese boks. Hy gee net 'n bevel aan die elektronika as dit nodig is om na 'n ander rat oor te skakel. Totdat die beheereenheid in hierdie modus 'n sein van die hefboom ontvang, sal die motor met dieselfde snelheid ry.
Die voordeel van hierdie modus is dat die bestuurder self die toename / afname in spoed beheer. Met hierdie funksie kan u byvoorbeeld die rem van die enjin gebruik as u afdraand gaan of tydens 'n lang klim. Ten einde die outomatisasie die werking van die transmissie onafhanklik aan te pas in ooreenstemming met so 'n padsituasie, moet die pakket van opsies van die voertuig hulp bevat wanneer u op hellings ry (in 'n ander artikel beskryf hoe hierdie assistent werk). Die semi-outomatiese modus van die Isitronic-robotkas stel die bestuurder in staat om die meganismes met geweld te laat oorskakel.

Sodat, as gevolg van 'n bestuurdersfout, die oordrag nie per ongeluk van hoë spoed tydens versnelling na lae spoed oorskakel nie (die bestuurder het per ongeluk die rathefboom in die halfoutomatiese modus gehaak), beheer die elektronika steeds die werking van die transmissie. Indien nodig, ignoreer die toestel sommige van die bestuurder se opdragte en beskou dit as lukraak.
In sommige modelle is daar ook ander modusse. Dit is hoe hulle werk:
- Winter... In hierdie geval begin die begin van die voertuig vanaf die tweede spoed teen lae enjinsnelheid om te verhoed dat die dryfwiele gly.
- Skop af... Wanneer die bestuurder die gas vinnig onderweg druk vir vinnige versnelling, skuif die elektronika die transmissie af en aktiveer die algoritme, waarvolgens die enjin tot hoër toere draai;
- Спорт... Hierdie modus is uiters skaars. In teorie aktiveer dit vinniger ratwisselings, maar as dit met een koppelaar toegerus is, werk hierdie modus steeds oneffektief.
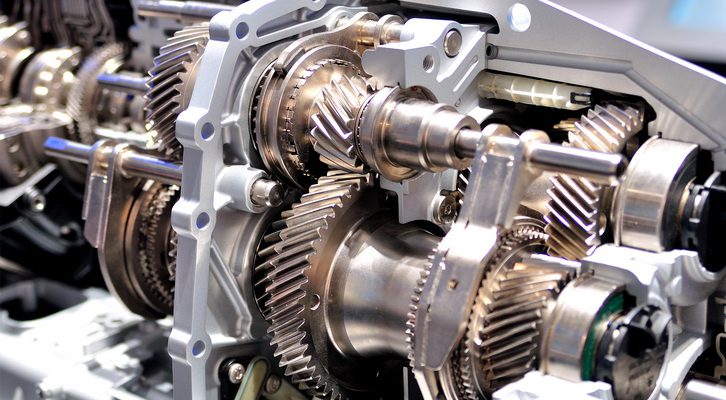
Easytronic-boksontwerp
Die ontwerp van die Easytronic-handrat sal die volgende komponente insluit:
- Die meganiese boks is die belangrikste een vir hierdie transmissie;
- Koppelaarmandjies;
- 'N Aandrywing wat die koppelingswrywingskyf uitdruk;
- 'N Aandrywing waarmee die elektronika spoed kan kies en aanskakel;
- Mikroprosessor-beheereenheid (alle outomatiese en robotratkaste gebruik 'n individuele ECU).
Dus, die robot, wat in sommige Opel-modelle geïnstalleer is, is gebaseer op die ontwerp van 'n vyfgang-handratkas. Slegs hierdie aanpassing word aangevul met 'n koppelaarmandjie, sowel as 'n ratskakelaar. So 'n boks werk met een koppelaar. Besonderhede oor hoe 'n robotkas met een koppelaar werk, word beskryf hier.
Ander motorvervaardigers het ook 'n voorafverkose tipe robotte ontwikkel. Hierdie aanpassing is toegerus met 'n dubbele koppelmandjie. 'N Voorbeeld van so 'n verandering is dieselfde DSG. Lees die struktuur en werking van die dubbelkoppelaar-transmissie in 'n ander resensie.
Kom ons kyk van naderby na die struktuur van die hoofelemente van die Easytronic-transmissie.
Koppelaaraandrywing
Die ontwerp van die koppelingsaandrywing van die Izitronic-boks sluit in:
- Elektriese motor;
- Worm-tipe reducer;
- Eksentrieke meganisme.
Die meganisme, toegerus met 'n eksentrieke, is verbind met 'n staaf wat in die suier van die GCC (koppelaar-hoofsilinder) geïnstalleer is. Die bewegingsgraad van hierdie staaf word deur 'n spesiale sensor vasgestel. Die eenheid speel dieselfde rol as die bestuurder se voet wanneer die koppelaarpedaal ingedruk word. Die taak van die meganisme sluit onder meer in:
- Dwing beheer om die wrywingskyf van die vliegwiel los te maak as die voertuig begin beweeg;
- Aansluiting / ontkoppeling van hierdie elemente tydens die beweging van die masjien vir die oorgang na die optimale snelheid;
- Ontkoppel die boks van die vliegwiel om die vervoer te stop.
Self-verstelende koppelaar
Die selfaanpassende tipe koppelaar is ook 'n kenmerk van die Isitronic-robotkas. Dit sal vir niemand 'n geheim wees dat die mandjie-aandrywing in die meganika van tyd tot tyd die kabel moet vasdraai nie (in sommige motors word 'n hefboomstruktuur gebruik).
Dit gebeur as gevolg van die slijtasie van die wrywingoppervlak van die skyf, wat die kragte beïnvloed wat die bestuurder moet aanwend om die ratkas van die enjin te ontkoppel. As die kabelspanning swak is, kan die geknars van die tandrat gehoor word tydens die spoedaanslag.
Die Easytronic-boks gebruik die SAC-meganisme, wat onafhanklik aanpas by die mate van skyfdrag. Hierdie komponent bied ook konstante en lae krag wanneer die koppelmandjie ingedruk word.
Hierdie funksie is uiters belangrik vir die diensbaarheid van nie net die wrywingsoppervlak van die koppelingskyf nie, maar ook alle transmissieratte. 'N Ander kenmerk van hierdie stelsel is dat, as gevolg van die geringe inspanning op die mandjie, die vervaardiger 'n laekrag-elektriese motor kan gebruik, wat minder elektriese energie wat deur die kragopwekker opgewek word, verbruik. Meer besonderhede oor die werking en toestel van die kragopwekker word beskryf afsonderlik.
Elektroniese beheereenheid
Aangesien die Izitronic-transmissie outomaties werk (en selfs wanneer die bestuurder die semi-outomatiese modus gebruik, sal die stelsel die aandrywers onafhanklik aan die gang sit), het dit 'n mikroprosessor nodig wat die seine van die sensors verwerk en die aandrywers aktiveer.
Die werking van die hele stelsel as geheel word beheer deur 'n elektroniese beheereenheid. Iemand dink dat hierdie mikroprosessor heeltemal outonoom is en nie met die hoof-ECU verbind is nie. In werklikheid is dit nie die geval nie. Hierdie twee elemente van die boordstelsel is onderling verbind. Sommige data wat na die sentrale eenheid gestuur word, word ook deur die transmissie-mikroprosessor gebruik. Voorbeelde hiervan is seine oor wielspoed en enjinsnelheid.

Van die funksies wat deur die transmissie-beheereenheid verrig word, is:
- Dit vang en verwerk alle seine van sensors wat verband hou met die doeltreffende werking van die transmissie. Hierdie sensors bevat die posisie-sensor van die rathefboom, wielsnelheid (dit is deel van die ABS-stelsel, wat breedvoerig beskryf word in 'n ander resensie), posisie van die versnellerpedaal, enjinsnelheid, ens.
- In ooreenstemming met die inligting wat ontvang word, word die ooreenstemmende algoritmes in die mikroprosessor geaktiveer, wat spesifieke pulse vorm;
- Stuur impulse aan die aandrywers om die koppelaar en vliegwiel te ontkoppel en die toepaslike rat te kies.
Rat seleksie en betrokkenheid dryf
Die ontwerp van die aandrywer vir die kies en verbind van ratte van ratte bestaan uit twee ratkaste. Elkeen maak staat op een elektriese motor. Hierdie meganismes vervang die bestuurder se hand wanneer hy die rathefboom in die gewenste posisie beweeg (in hierdie geval word die kragte deur die tuimelaar en die kardanboks oorgedra).
In outomatiese modus bepaal die elektronika onafhanklik die oomblik wanneer dit nodig is om die vurkaandrywing te aktiveer, sowel as die beweging van die ratte na die dryfas.
Ratskakelaar
Die volgende komponent van die Isitronic-robotratkas is die ratkieser. Dit is die paneel waarin die hefboom gemonteer is. Met die hulp kies die bestuurder die modus wat nodig is om 'n spesifieke taak uit te voer. Vir gebruiksgemak is hierdie paneel gemerk om aan te dui waar die modus is.
Ondanks die doel daarvan, het hierdie element nie 'n rigiede fisiese verband met die ratkasmeganisme nie. As dit in meganika in noodmodus moontlik is om 'n soort manipulasie met die meganisme uit te voer, byvoorbeeld om die spoed af te skakel, dan is hierdie element in hierdie geval 'n soort skakelknop wat gestileer is as 'n ratkierie, sein na die mikroprosessor.
Baie motorvervaardigers wat hul produkte met soortgelyke uitsendings toerus, gebruik glad nie die klassieke hefboom nie. In plaas daarvan is 'n draai-wasmasjien verantwoordelik om die toepaslike modus te kies. 'N Sensor is onder die ratkieskieser geïnstalleer wat die posisie van die hefboom bepaal. Gevolglik stuur dit die vereiste sein na die beheereenheid, wat weer die vereiste funksies aktiveer.

Aangesien die ratwisseling in elektroniese modus plaasvind, kan die bestuurder 'n stuurwiel met skofskakelaars aanskaf, waardeur dit makliker sal wees om die skakelaar van die ooreenstemmende rat in semi-outomatiese modus te beheer. Maar dit behoort eerder tot die kategorie van visuele afstemming. Die rede hiervoor is dat die Izitronic, soos in sportmotors, 'n werklike sportiewe skakeling kort, sodat selfs 'n baie vinnige beweging van die hefboom na die plus- of minusposisie steeds met 'n sekere vertraging gepaard gaan.
Wenke vir die gebruik van die ratkas Izitronic
Die Easytronic-robotkas word gevind in sommige afwerkingsvlakke van modelle soos Zafira, Meriva, Corsa, Vectra C en Astra, vervaardig deur Opel. Baie motoriste kla oor die werking van hierdie kassie. Die hoofrede is dat die stelsel volgens die beskrywing van die werkingsmeganisme 'n gemakliker evolusie van 'n handrat is.
Aangesien die eenheid in outomatiese modus werk, word dieselfde gladheid en sagtheid daarvan verwag as van 'n klassieke outomatiese masjien wat deur 'n wringkragomskakelaar aangedryf word (lees vir meer inligting oor hoe hierdie meganisme werk) hier). Maar in die lewe gebeur daar 'n bietjie anders. Die robot word gekenmerk deur die styfheid van die koppelingsskyfverbinding, asof die bestuurder skielik die pedaal laat val nadat hy die spoed aangeskakel het. Die rede hiervoor is dat elektronika nie daartoe in staat is om die inspanning 'soos 'n mens' te laat voel nie.
Die robot het dieselfde nadele as in klassieke meganika, met die uitsondering van bykomende potensiële beskadigingsones, byvoorbeeld die elektriese aandrywing van die mandjie of die boks self.
Om die lewensduur van die Easytronic-handrat te verleng, moet die bestuurder die volgende aanbevelings nakom:
- Wanneer die motor by 'n verkeerslig of 'n spoorwegoorgang stop, moet u die versnellingshendel na neutraal skuif en nie die rem hou nie, soos in die geval van 'n masjien. Alhoewel die masjien nie kan beweeg as die masjien tot stilstand kom en die remme inslaan nie, is die aandrywing van die koppelaarmandjie in werking en onderhewig aan swaar spanning. In neutrale spoedmodus word die koppelingsskyf teen die vliegwiel gedruk, en dan is die dryfas van die boks nie met ratte ingedraai nie. As u die rem oor 'n lang tyd vashou, hou die skyf nie meer die veerbelaste skyf vas nie, en dan sal die wrywingskerm met die vliegwiel in aanraking kom, wat oorverhit en verslyt.
- Terwyl u parkeer, moet u die motor nie vinnig laat nie, soos die meeste motoriste met 'n handratkas dit doen. Hiervoor word die parkeerrem en neutrale rat geïnstalleer.
- Die elektronika van die boks bevestig baie verskillende seine, insluitend die werking van die gloeilampe wat brand wanneer die rem ingedruk word. As een van hierdie ligte uitgebrand het, sal die stroombaan nie sluit nie, en die bestuurseenheid sal moontlik nie die rempedaal se druk regstel nie, dus kan die aandrywing nie aanskakel om die boks van die vliegwiel te ontkoppel nie.
- Roetine-versorgingsprosedures vir versending moet nie nagelaat word nie. Volg die aanbevelings van die vervaardiger vir die regte tipe smeermiddel wanneer u die olie vervang. In 'n ander resensie ons het al oorweeg watter soort olie in ratkaste gebruik word.
- Wissel die remvloeistof betyds in die koppelingsaandrywingskring. Hierdie prosedure moet gemiddeld elke 40 duisend km uitgevoer word. kilometers.
- Moenie die outomatiese modus gebruik nie, maar skakel oor na die semi-outomatiese modus sodat die elektronika nie onnodig van ratte skakel nie, as die motor in 'n ernstige verkeersopeenhoping of verkeerde stop loop.
- Moenie die motor gebruik om veldrytoestande te oorkom nie, en ry die motor so akkuraat moontlik op ys, sonder wielglip, sodat die ratte nie verander as die motor 'n onvanpaste snelheid het nie.
- As die motor stilstaan, moet u in geen geval probeer om uit die val te kom deur die dryfwiele te swaai of in te gly nie.
- Die diens van die eenheid hang direk af van die bestuurstyl wat die bestuurder gebruik. Om hierdie rede is hierdie oordrag bloot in 'n sportiewe bestuurstyl gekontraïndikeer.
Dit is nodig om die enjin aan te sit en met die isitronic-motor te begin ry in die volgende volgorde:
- Volgens die gebruiksaanwysings van die voertuig is dit slegs nodig om die binnebrandenjin aan te skakel as die neutrale spoed aan is, hoewel die ervaring toon dat die krageenheid teen 'n ander spoed sal begin, maar die rempedaal moet ingedruk word. U moet dit natuurlik nie doen nie, omdat die oortreding van hierdie aanbeveling nie net die enjin blootstel aan onnodige vrag tydens die inbedryfstelling nie, maar ook die koppelaar verslyt.
- Al is die motor in neutraal, sal die enjin nie begin voordat die rempedaal ingedruk word nie (in hierdie geval sal die N-ikoon op die paneelbord brand).
- Die begin van die beweging moet gepaard gaan met 'n ingedrukte rempedaal en die kieshendel na posisie A. In die somer word die eerste spoed aangeskakel, en in die winter, die tweede, as daar 'n ooreenstemmende modus aan boord is stelsel.
- Die rem word losgemaak en die motor begin beweeg. As die bestuurder nie rem aandraai nie, maar die hefboom onmiddellik van neutraal na modus A skuif, is dit nodig om die gas saggies in te druk, soos in die meganika. Afhangend van die gewig van die motor, kan die enjin stop sonder om te vul.
- Verder werk die transmissie in outomatiese modus, afhangende van die aantal omwentelings van die binnebrandenjin en die posisie van die gaspedaal.
- Agterspoed word slegs geaktiveer as die motor heeltemal gestop is (dit geld ook vir werk aan die werktuigkundiges). As die rem ingedruk word, word die rathefboom na die posisie R beweeg, die rem word losgelaat en die motor begin teen die minimum enjinsnelheid beweeg. U kan hierdie prosedure uitvoer sonder om op die rempedaal te druk, slegs as u na R oorskakel, moet u 'n bietjie enjinsnelheid byvoeg.

Daar moet in gedagte gehou word dat die begin van beweging, ongeag of dit die eerste of omgekeerde spoed is, slegs met die rempedaal ingedruk moet word. In hierdie geval sal die koppelaar langer hou.
Voor- en nadele van die kontrolepunt
Hoe lank dit ook al ontwikkel is, het enige voordele, maar terselfdertyd is dit nie sonder nadele nie. Dieselfde geld vir die Isitronic-robotkontrolepunt. Hier is die voordele van hierdie transmissie:
- In vergelyking met 'n klassieke masjien kos dit minder. Die rede is dat dit meestal gebaseer is op meganika. Die ontwerp gebruik nie 'n wringkragomskakelaar wat baie olie benodig, en meer ruimte om op 'n motor te installeer nie;
- Die nuwe boks bied die motor goeie dinamika (in vergelyking met die outomatiese, is dit 'n orde van grootte hoër);
- In dieselfde vergelyking met 'n outomatiese ratkas, toon hierdie kassie die ekonomie ten opsigte van die brandstofverbruik deur die enjin;
- Vereis nie baie olie nie - die beweging gebruik dieselfde volume as die verwante meganika.
Ondanks die doeltreffendheid daarvan, het die robotagtige eenheid verskeie belangrike nadele:
- Op die oomblik dat die snelhede aangeskakel word, word rukke gevoel asof die bestuurder die koppelaarpedaal skielik loslaat, wat die rygerief met 'n dinamiese stel snelheid beïnvloed;
- Selfs met noukeurige werking, het die boks 'n klein werkbron;
- Aangesien die ontwerp 'n enkele koppelaar gebruik, is die periode tussen ratwisseling voelbaar (werk gaan gepaard met 'n vertraging);
- U moet baie meer geld spandeer op die onderhoud en herstel van die toestel as met dieselfde prosedures in die geval van klassieke meganika;
- Aangesien die ratkas met 'n vertraging plaasvind, word die enjinbron nie met die maksimum doeltreffendheid gebruik nie;
- As u hierdie oordrag van die Opel-onderneming in die motor installeer, word die enjinkrag nie ten volle benut nie;
- Met die uitsondering van die semi-outomatiese modus, het die bestuurder geen vryheid van aksie tydens die bestuur van die motor nie - die boks skakel slegs die snelheid in die modus waarvoor dit ingestel is;
- U kan nie skyfstemming uitvoer deur 'n ander firmware op die beheereenheid te installeer om die eienskappe van die toestel te verander nie. Om dit te doen, moet u nog 'n ECU koop met die toepaslike firmware (afsonderlik lees oor die rede waarom sommige motoreienaars chip-tuning doen, en watter eienskappe deur hierdie prosedure beïnvloed word).
Aan die einde van ons oorsig bied ons 'n kort video aan hoe u gewoond raak aan Easytronic na die masjien:


