
Handrat - robotkas
inhoud
Enige moderne motor kan nie glad begin en beweeg as daar geen oordrag in die toestel is nie. Vandag is daar 'n wye verskeidenheid van allerhande ratkaste, wat die bestuurder nie net in staat stel om die opsie te kies wat by sy materiële vermoëns pas nie, maar ook die maksimum gemak van die bestuur van 'n voertuig moontlik maak.
Kortliks word die hoofsoorte oordrag beskryf aparte oorsig... Kom ons bespreek nou meer in detail wat 'n robotratkas is, die belangrikste verskille daarvan met 'n handratkas, en kyk ook na die werking van hierdie eenheid.
Wat is 'n robotkas
Die werking van die ratkas is amper identies aan die meganiese analoog, met die uitsondering van sommige funksies. Die toestel van die robot bevat baie onderdele waaruit die meganiese weergawe van die boks bestaan, wat al vir almal bekend is. Die belangrikste verskil tussen robot is dat die beheer daarvan van 'n mikroprosessor tipe is. In sulke ratkaste word ratskakeling gedoen deur elektronika gebaseer op data van sensors van die enjin, gaspedaal en wiele.

'N Robotkas kan ook 'n outomatiese masjien genoem word, maar dit is 'n verkeerde naam. Die feit is dat outomatiese ratkas dikwels as 'n veralgemeende begrip gebruik word. Dieselfde variator het dus 'n outomatiese modus vir die skakel van ratverhoudings, dus vir sommige is dit ook 'n outomatiese modus. In terme van struktuur en werking is die robot nader aan 'n meganiese houer.
Uiterlik is dit onmoontlik om te onderskei tussen handratkas en outomatiese ratkas, want hulle kan 'n identiese keurder en bak hê. U kan die transmissie slegs nagaan terwyl die voertuig ry. Elke tipe eenheid het sy eie eienskappe van werk.
Die hoofdoel van 'n robot-oordrag is om bestuur so maklik as moontlik te maak. Die bestuurder hoef nie self te skakel nie - hierdie werk word deur die beheereenheid gedoen. Benewens gemak, poog vervaardigers van outomatiese ratkaste om hul produkte goedkoper te maak. Vandag is die robot die mees bekostigbare tipe ratkas na meganika, maar dit bied nie so 'n rygerief soos 'n variator of outomaties nie.
Die beginsel van 'n robotratkas
Die robot-oordrag kan outomaties of semi-outomaties na die volgende spoed oorskakel. In die eerste geval ontvang die mikroverwerker-eenheid seine van die sensors, op grond waarvan die algoritme wat deur die vervaardiger geprogrammeer is, geaktiveer word.
Die meeste ratkaste is toegerus met 'n handskakelaar. In hierdie geval sal die snelhede steeds outomaties aanskakel. Die enigste ding is dat die bestuurder die oomblik waarop hy 'n op- of afskakeling skakel, onafhanklik kan aandui. Sommige outomatiese uitsendings van die Tiptronic-tipe het 'n soortgelyke beginsel.
Om die spoed te verhoog of te verlaag, beweeg die bestuurder die kieshendel na + of na -. Danksy hierdie opsie noem sommige mense hierdie oordrag opeenvolgend of opeenvolgend.
Die robotkas werk volgens die volgende skema:
- Die bestuurder sit die rem in, skakel die enjin aan en beweeg die bestuurskieshendel na posisie D;
- Die sein van die eenheid gaan na die boks-eenheid;
- Afhangend van die gekose modus, aktiveer die beheereenheid die toepaslike algoritme waarvolgens die eenheid sal werk;
- In die proses van beweging stuur die sensors seine na die "brein van die robot" oor die snelheid van die voertuig, oor die vrag van die krageenheid, sowel as oor die huidige ratkasmodus;
- Sodra die aanwysers nie meer ooreenstem met die program wat in die fabriek geïnstalleer is nie, gee die beheereenheid die opdrag om na 'n ander rat oor te skakel. Dit kan 'n toename of 'n afname in spoed wees.
As 'n motorbestuurder 'n motor bestuur, moet hy sy voertuig aanvoel om te bepaal wanneer hy na 'n ander spoed moet oorskakel. In 'n robot-analoog vind 'n soortgelyke proses plaas, net die bestuurder hoef nie na te dink oor wanneer die skakelhefboom na die gewenste posisie moet beweeg nie. Die mikroprosessor doen dit eerder.
Die stelsel monitor alle inligting van alle sensors en kies die optimale rat vir 'n spesifieke lading. Die ratkas het 'n hidromeganiese aandrywer sodat die elektronika van rat kan verwissel. In 'n meer algemene weergawe, in plaas van hidromeganika, word 'n elektriese aandrywing of 'n servo-aandrywer geïnstalleer, wat die koppelaar in die boks verbind / ontkoppel (dit het 'n soortgelyke ooreenkoms met 'n outomatiese masjien - die koppelaar is nie geleë waar dit is nie) is in die handratkas, naamlik naby die vliegwiel, maar in die behuising self transmissie).
Wanneer die beheereenheid 'n sein gee dat dit tyd is om na 'n ander spoed oor te skakel, word die eerste elektriese (of hidromeganiese) servo-aandrywing eers geaktiveer. Dit skakel die koppelingswrywingoppervlaktes uit. Die tweede servo beweeg dan die ratte in die meganisme na die gewenste posisie. Dan laat die eerste die koppelaar stadig los. Met hierdie ontwerp kan die meganisme werk sonder die bestuurder, sodat 'n masjien met 'n robotkas nie 'n koppelaarpedaal het nie.

Baie seleksiebokse het posisies gedwing. Hierdie sogenaamde tiptronic stel die bestuurder in staat om onafhanklik die oomblik van oorskakeling na hoër of laer spoed te beheer.
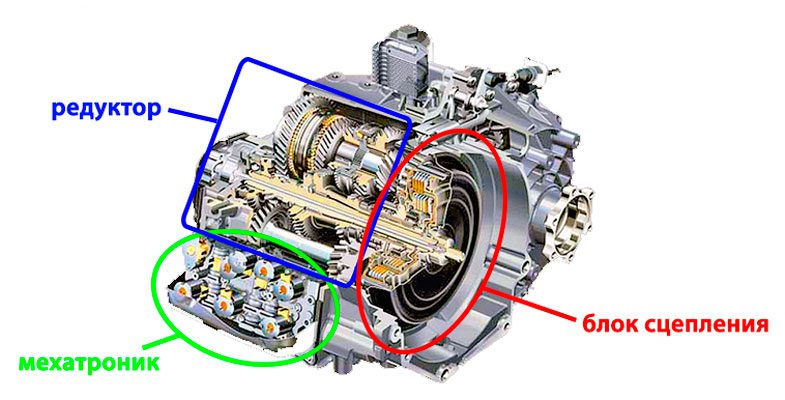
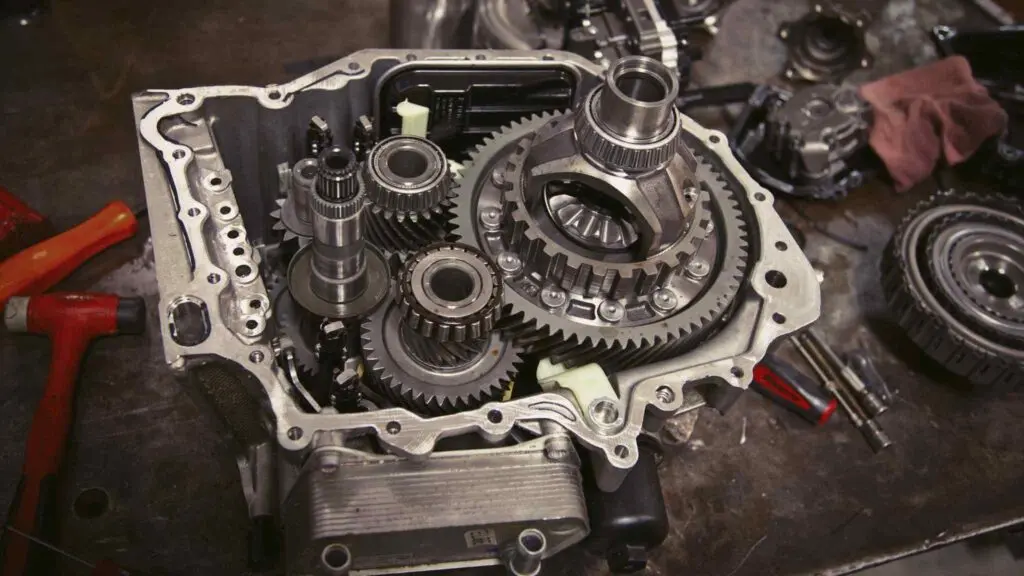
Robotratkas-toestel
Vandag is daar verskillende soorte robotuitsendings vir passasiersmotors. Hulle kan in sommige bedieningselemente van mekaar verskil, maar die hoofdele bly identies.
Hier is die nodusse wat in die ratkas ingesluit is:
- Koppelaar. Afhangend van die vervaardiger en die aanpassing van die eenheid, kan dit een onderdeel wees met 'n wrywingsoppervlak of verskeie soortgelyke skywe. Dikwels is hierdie elemente in die koelmiddel geleë, wat die werking van die eenheid stabiliseer en voorkom dat dit oorverhit. Die preselektiewe of dubbele opsie word as meer effektief beskou. Terwyl een rat ingeskakel is, berei die tweede stel in hierdie verandering voor om die volgende spoed aan te skakel.
- Die belangrikste deel is 'n konvensionele meganiese boks. Elke vervaardiger gebruik verskillende eie ontwerpe. Byvoorbeeld, 'n robot van die Mercedes-handelsmerk (Speedshift) is intern 'n 7G-Tronic outomatiese ratkas. Die enigste verskil tussen die eenhede is dat in plaas van 'n wringkragomskakelaar 'n koppelaar met verskeie wrywingskyfies gebruik word. Die BMW -onderneming het 'n soortgelyke benadering. Sy SMG-ratkas is gebaseer op 'n sesgang-handratkas.
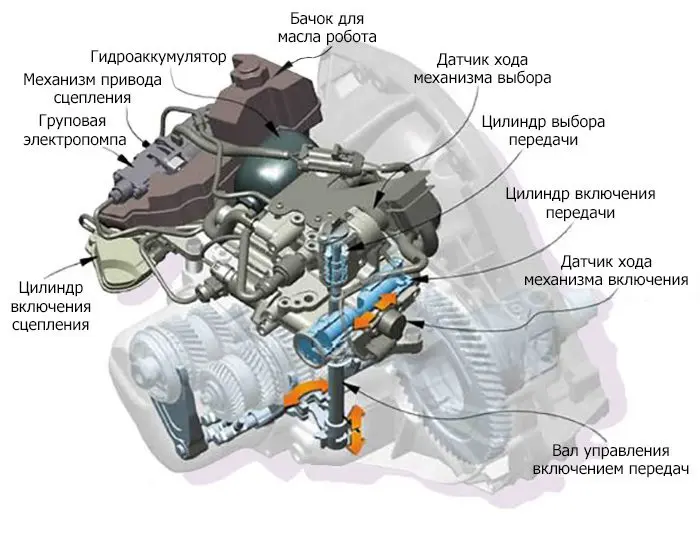
- Koppelaar en ratkas. Daar is twee opsies - met 'n elektriese aandrywing of 'n hidromeganiese analoog. In die eerste geval word die koppelaar deur 'n elektriese motor uitgedruk, en in die tweede geval deur hidrouliese silinders met EM-kleppe. Die elektriese aandrywing werk stadiger as die hidroulika, maar dit is nie nodig om 'n konstante druk in die leiding te handhaaf waaruit die elektro-hidrouliese tipe werk nie. Die hidrouliese robot, daarenteen, beweeg baie vinniger na die volgende fase (0,05 sekondes teenoor 0,5 sekondes vir 'n elektriese analoog). 'N Elektriese ratkas word hoofsaaklik op luukse motors geïnstalleer, en 'n hidromeganiese ratkas word op premium sportmotors geïnstalleer, aangesien die versnellingsspoed daarin baie belangrik is sonder om die kragtoevoer na die dryfas te onderbreek.

- Sensor. Daar is baie sulke dele in die robot. Hulle monitor baie verskillende parameters van die transmissie, byvoorbeeld die posisie van die vurke, die omwenteling van die toevoer- en uitgaande as, in welke posisie die seleksieskakelaar gesluit is, die temperatuur van die koelmiddel, ens. Al hierdie inligting word na die meganisme-beheertoestel gevoer.
- ECU is 'n mikroprocessoreenheid waarin verskillende algoritmes geprogrammeer is vir verskillende aanwysers wat van sensors af kom. Hierdie eenheid is gekoppel aan die hoofbeheereenheid (daarvandaan kom data oor enjinbedryf), asook elektroniese wielvergrendelingstelsels (ABS of ESP).
- Aktuators - hidrouliese silinders of elektriese motors, afhangende van die modifikasie van die boks.
Die besonderhede van die werk van die RCP
Om die voertuig glad te laat begin, moet die bestuurder die koppelaarpedaal korrek gebruik. Nadat hy die eerste of trurat ingesluit het, moet hy die pedaal glad loslaat. Sodra die bestuurder 'n gevoel het vir die skakeling van die skyfies, terwyl die pedaal losgelaat word, kan hy toere by die enjin voeg sodat die motor nie stilstaan nie. Dit is hoe werktuigkundiges werk.
'N Identiese proses vind in die robot-eweknie plaas. Slegs in hierdie geval word 'n groot vaardigheid nie van die bestuurder vereis nie. Hy hoef net die bokskakelaar na die regte posisie te skuif. Die motor sal begin beweeg volgens die instellings van die beheereenheid.

Die eenvoudigste enkelkoppelaar-aanpassing werk op dieselfde manier as klassieke meganika. Terselfdertyd word die aanwesigheid van een probleem egter waargeneem - die elektronika teken nie die terugvoer van die koppelaar op nie. As 'n persoon in staat is om vas te stel hoe soepel dit nodig is om die pedaal in 'n spesifieke geval los te laat, werk die outomatisering strenger, sodat die beweging van die motor gepaard gaan met tasbare rukke.
Dit word veral gevoel in modifikasies met 'n elektriese aandrywing van die aandrywers - terwyl die rat skuif, sal die koppelaar in 'n oop toestand wees. Dit sal 'n onderbreking in die stroom van die wringkrag beteken, waardeur die motor stadiger begin raak. Aangesien die rotasiesnelheid van die wiele al minder ooreenstem met die ingeskakelde rat, kom 'n effense ruk voor.
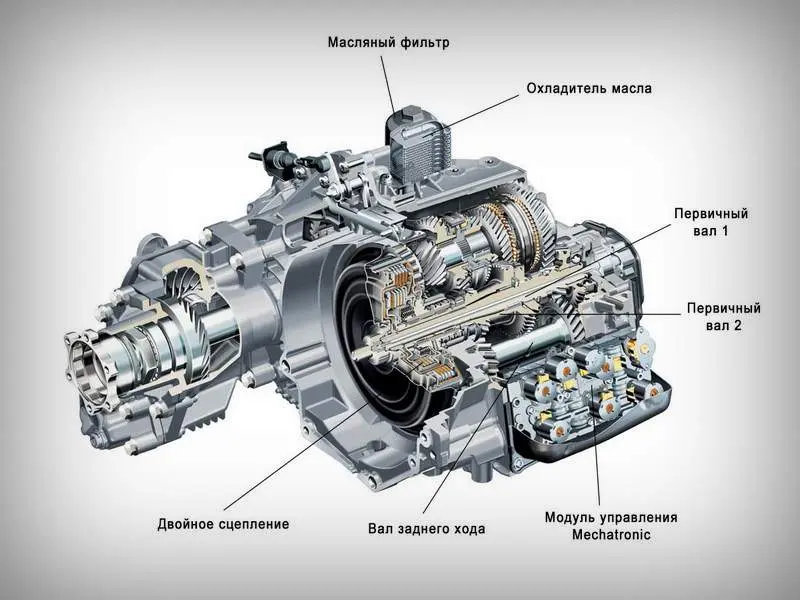
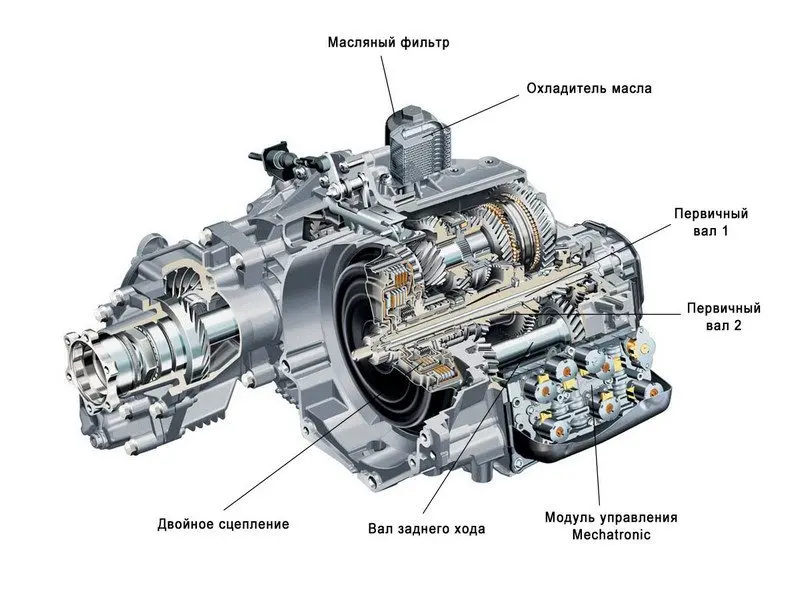
'N Innoverende oplossing vir hierdie probleem was die ontwikkeling van 'n dubbelkoppelaar-aanpassing. Die opvallende verteenwoordiger van so 'n transmissie is die Volkswagen DSG. Kom ons bekyk die funksies daarvan van naderby.
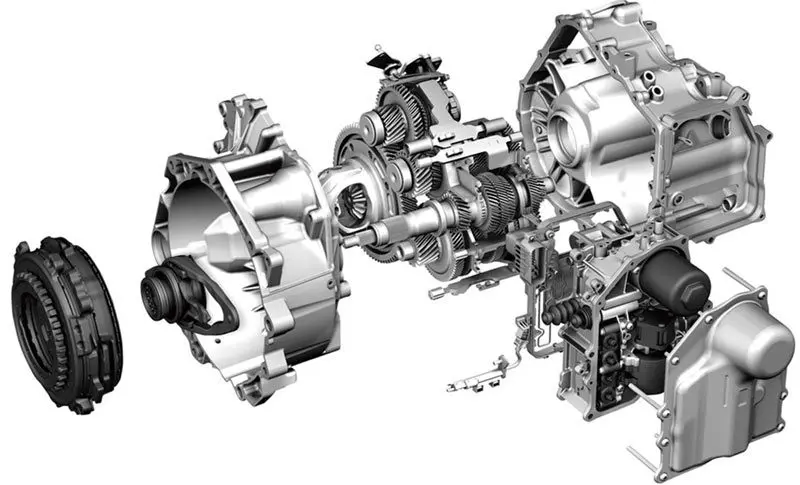
Kenmerke van die DSG-robotkas
Hierdie akroniem staan vir direkskakel ratkas. In werklikheid is dit twee meganiese bokse wat in een behuising geïnstalleer is, maar met een aansluitpunt aan die onderstel van die masjien. Elke meganisme het sy eie koppelaar.
Die belangrikste kenmerk van hierdie wysiging is die voorkeusemodus. Dit wil sê, terwyl die eerste as loop terwyl die rat ingeskakel is, verbind die elektronika al die ooreenstemmende ratte (wanneer dit versnel om die rat te vergroot, as dit vertraag - na laer) van die tweede as. Die hoofaktuator hoef net die een koppelaar te ontkoppel en die ander aan te sluit. Sodra 'n sein van die beheereenheid ontvang word om na 'n ander stadium oor te skakel, word die werkende koppelaar oopgemaak, en die tweede een met reeds ingepaste ratte word onmiddellik gekoppel.
Met hierdie ontwerp kan u sonder sterk rukke ry as u versnel. Die eerste ontwikkeling van 'n preselektiewe wysiging verskyn in die 80's van die vorige eeu. Weliswaar, dan is robotte met dubbele koppelaar op tydren- en renmotors geïnstalleer waarin spoed en akkuraatheid van ratskakeling van groot belang is.
As ons die DSG-boks vergelyk met 'n klassieke outomatiese, het die eerste opsie meer voordele. Eerstens, as gevolg van die meer bekende struktuur van die hoofelemente (die vervaardiger kan enige gereedgemaakte meganiese analoog as basis neem), sal so 'n doos goedkoper te koop wees. Dieselfde faktor beïnvloed die instandhouding van die eenheid - die meganika is betroubaarder en makliker om te herstel.
Dit het die vervaardiger in staat gestel om 'n innoverende versending op die begrotingsmodelle van hul produkte te installeer. Tweedens merk baie eienaars van voertuie met so 'n ratkas 'n toename in die ekonomie van die motor in vergelyking met 'n identiese model, maar met 'n ander ratkas.
Die ingenieurs van die VAG-onderneming het twee variante van die DSG-transmissie ontwikkel. Een daarvan is 6 gemerk, en die ander 7, wat ooreenstem met die aantal stappe in die vak. Ook gebruik 'n outomatiese sesgang 'n nat koppelaar, en 'n analoog met sewe gange gebruik 'n droë koppelaar. Meer besonderhede oor die voor- en nadele van die DSG-boks, en hoe anders die DSG 6-model van die sewende wysiging verskil, word beskryf in afsonderlike artikel.
Voordele en nadele
Die oorwegende tipe oordrag het beide positiewe en negatiewe kante. Die voordele van die doos sluit in:
- So 'n transmissie kan saam met 'n krageenheid van bykans enige krag gebruik word;
- In vergelyking met 'n variator en 'n outomatiese masjien, is die robotweergawe goedkoper, hoewel dit 'n taamlike innoverende ontwikkeling is;
- Robotte is betroubaarder as ander outomatiese uitsendings;
- As gevolg van die interne ooreenkoms met meganika, is dit makliker om 'n spesialis te vind wat die herstelwerk aan die eenheid sal neem;
- Doeltreffender ratskakeling maak die gebruik van enjinkrag moontlik sonder 'n kritieke toename in brandstofverbruik;
- Deur die doeltreffendheid te verbeter, stort die masjien minder skadelike stowwe in die omgewing uit.
Ten spyte van die duidelike voordele bo ander outomatiese transmissies, het die robot verskeie belangrike nadele:
- As die motor met 'n enkelskyf-robot toegerus is, kan die rit met so 'n vervoer nie gemaklik genoem word nie. Wanneer u ratte wissel, sal daar tasbare rukke wees, asof die bestuurder die koppelaarpedaal skielik op die werktuigkundiges gooi.
- Meestal val die koppeling (minder gladde inskakeling) en die aandrywers in die eenheid. Dit bemoeilik die herstel van uitsendings, aangesien dit 'n klein werkhulpbron het (ongeveer 100 duisend kilometer). Dit is selde dat servo's herstel kan word en dat 'n nuwe meganisme duur is.
- Wat die koppelaar betref, is die skyfbron ook baie klein - ongeveer 60 duisend. Boonop is dit ongeveer die helfte van die hulpbron nodig om die "verbinding" van die kissie uit te voer onder die wrywingsoppervlak van die onderdele.
- As daar gepraat word oor die preselektiewe wysiging van die DSG, blyk dit meer betroubaar te wees as gevolg van minder tyd om oor te skakel (danksy die motor vertraag dit nie soveel nie). Ten spyte hiervan ly die greep steeds by hulle.
Met inagneming van die genoemde faktore, kan ons aflei dat meganika nog nie gelyk is aan betroubaarheid en werklewe nie. As klem geplaas word op maksimum gemak, is dit beter om 'n variator te kies (wat is die kenmerk daarvan, lees hier). Daar moet in gedagte gehou word dat so 'n transmissie nie die geleentheid bied om brandstof te bespaar nie.
Ten slotte bied ons 'n kort video-vergelyking van die hooftipes uitsendings - die voor- en nadele daarvan:

Vrae en antwoorde:
Wat is die verskil tussen 'n outomaat en 'n robot? Die outomatiese ratkas werk ten koste van 'n wringkragomsetter (daar is geen stewige koppeling met die vliegwiel deur die koppelaar nie), en die robot is analoog aan meganika, net die snelhede word outomaties geskakel.
Hoe om ratte op 'n robotboks te verander? Die beginsel van die bestuur van 'n robot is identies aan die bestuur van 'n outomatiese: die gewenste modus word op die kieser gekies, en die enjinspoed word deur die petrolpedaal gereguleer. Die snelhede sal vanself oorskakel.
Hoeveel pedale is daar in 'n motor met 'n robot? Alhoewel die robot struktureel soortgelyk is aan 'n werktuigkundige, word die koppelaar outomaties van die vliegwiel ontkoppel, dus het 'n motor met 'n robottransmissie twee pedale (gas en rem).
Hoe om 'n motor behoorlik met 'n robotboks te parkeer? Die Europese model moet in A-modus of in trurat geparkeer word. As die motor Amerikaans is, dan is daar 'n P-modus op die kieser.
Een opmerking
Dawid
Hallo, ek het hulp nodig, 203 koepees het in noodmodus gegaan, wat kan ek doen?