Hoekom is jou GPS- of STRAVA-hoogte onakkuraat?
inhoud
'n Herhalende vraag of vraag ontstaan oor hoogte-akkuraatheid en GPS-hoogteverskille.
Alhoewel dit triviaal kan lyk, is dit moeilik om 'n akkurate hoogte te kry, maar in die horisontale vlak kan jy maklik 'n maatband, tou, geodesiese ketting plaas, of die omtrek van 'n wiel ophoop om afstand te meet. aan die ander kant is dit moeiliker om die meter 📐 in die vertikale vlak te plaas.
GPS-hoogtes is gebaseer op 'n wiskundige voorstelling van die vorm van die aarde, terwyl hoogtes op 'n topografiese kaart gebaseer is op 'n vertikale koördinaatstelsel wat met die aardbol geassosieer word.
Daarom is dit twee verskillende stelsels wat op een punt moet saamval.

Hoogte en vertikale daling is parameters waarmee die meeste fietsryers, bergfietsryers, stappers en klimmers na 'n rit sal wil raadpleeg.
Die instruksies vir die verkryging van die vertikale profiel en korrekte hoogteverskil is relatief goed gedokumenteer in buite-GPS-handleidings (soos die Garmin GPSMap-reeks handleidings), paradoksaal genoeg is hierdie inligting amper afwesig of kripties in die beoogde GPS-gebruikershandleidings. vir fietsryers (byvoorbeeld gidse vir die Garmin Edge GPS-reeks).
Garmin Naverkoopdiens deel al die nuttige raad uit, net soos die TwoNav. Vir ander GPS-vervaardigers of -toepassings (behalwe Strava) is dit 'n groot leemte 🕳.
Hoe om die hoogte te meet?
Verskeie tegnieke:
- Deur die bekende Thales-stelling in die praktyk toe te pas,
- Verskeie triangulasie tegnieke,
- Met behulp van 'n hoogtemeter,
- Radar, Deal,
- Satellietmetings.
Barometriese hoogtemeter
Dit was nodig om die standaard te bepaal: die hoogtemeter vertaal die atmosferiese druk van 'n plek in 'n hoogte. 'n Hoogte van 0 m stem ooreen met 'n druk van 1013,25 mbar op seevlak by 'n temperatuur van 15 ° Celsius.

In die praktyk word hierdie twee voorwaardes selde op seevlak nagekom, byvoorbeeld tydens die skryf van hierdie artikel was die druk op die kus van Normandië 1035 mbar, en die temperatuur is naby aan 6 °, wat kan lei tot 'n fout op 'n hoogte van ongeveer 500 m.
Die barometriese hoogtemeter gee akkurate hoogte na heraanpassing as druk-/temperatuurtoestande stabiliseer.
Aanpassing is om 'n akkurate hoogte vir 'n ligging te handhaaf, en dan pas die hoogtemeter daardie hoogte aan in reaksie op veranderinge in atmosferiese druk en temperatuur.
’n Daling in temperatuur 🌡 vernou die drukkurwes en die hoogte verhoog, en omgekeerd as die temperatuur toeneem.
Die vertoonde hoogtewaarde sal sensitief wees vir veranderinge in omgewingstemperatuur, die gebruiker van die hoogtemeter, wat dit op die pols vashou of dra, moet bewus wees van die effek van plaaslike temperatuurveranderinge op die vertoonde waarde (byvoorbeeld: horlosie toe / oop met mou, relatiewe wind as gevolg van vinnige of stadige bewegings, die invloed van liggaamstemperatuur, ens.).
Om die stabiele lugmassa te vereenvoudig, is dit die stabiele weer 🌥.

Wanneer dit korrek gebruik word, is die barometriese hoogtemeter 'n betroubare verwysingsinstrument vir 'n verskeidenheid toepassings soos lugvaartkunde, staptogte, bergklim ...
Hoogte GPS
GPS bepaal die hoogte van 'n plek in verhouding tot die ideale sfeer wat die Aarde simuleer: "Ellipsoïed". Aangesien die aarde onvolmaak is, moet hierdie hoogte getransformeer word om die "geoïde" hoogte te kry 🌍.
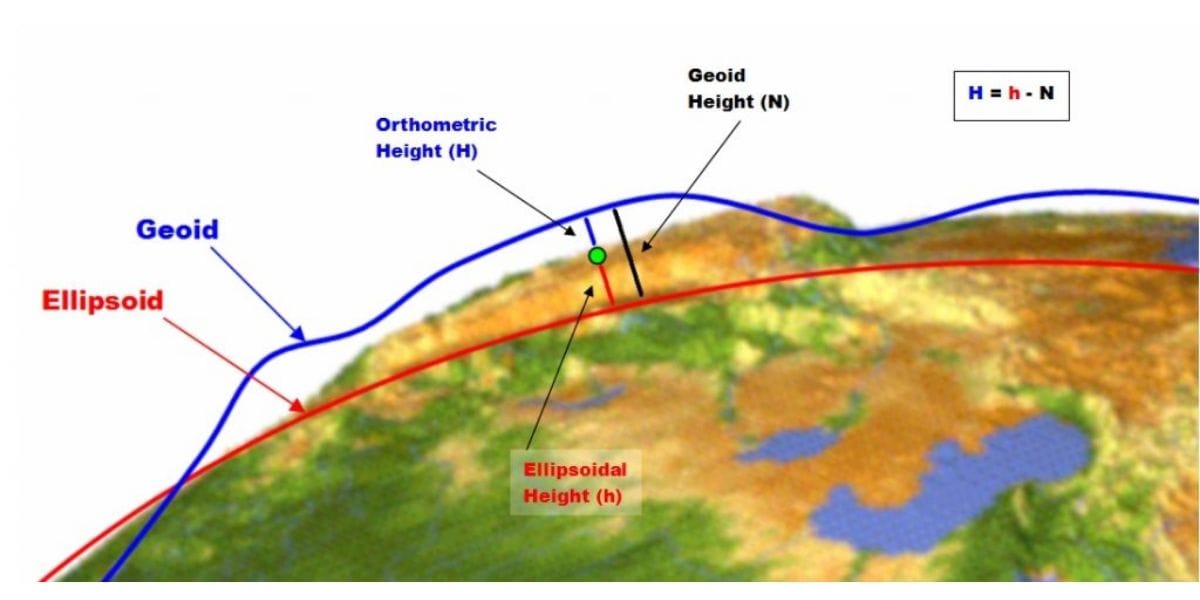
’n Waarnemer wat die hoogte van ’n opnamemerker met behulp van GPS lees, kan ’n afwyking van etlike tientalle meters sien, hoewel sy GPS reg werk onder ideale ontvangstoestande. Is die GPS-ontvanger dalk verkeerd?

Hierdie verskil word verklaar deur die akkuraatheid van die modellering van die ellipsoïed en veral die geoïedmodel, wat kompleks is as gevolg van die feit dat die aarde se oppervlak nie 'n ideale sfeer is nie, anomalieë bevat, onderhewig is aan menslike modifikasies en voortdurend verander. (Telluric en Human).
Hierdie onakkuraathede sal gekombineer word met meetfoute wat inherent aan GPS is, en sal onakkuraathede en konstante variasies in die hoogte veroorsaak wat deur GPS gerapporteer word.
Satellietgeometrieë wat goeie horisontale akkuraatheid bevoordeel, dit wil sê die lae posisie van die satelliete op die horison, verhoed akkurate hoogteverkryging. Die orde van grootte van die vertikale akkuraatheid is 1,5 keer die horisontale akkuraatheid.
Die meeste GPS-skyfiestelvervaardigers integreer die wiskundige model in hul sagteware. wat die geodetiese model van die aarde benader en verskaf die hoogte gespesifiseer in hierdie model.
Dit beteken dat as jy op die see loop dit nie ongewoon is om negatiewe of positiewe hoogte te sien nie, want die geodetiese model van die aarde is onvolmaak, en by hierdie tekortkoming moet die fout inherent aan GPS gevoeg word. Die kombinasie van hierdie foute kan 'n hoogteafwyking van meer as 50 meter op sekere plekke veroorsaak 😐.
Die geoïde modelle is verfyn, veral die hoogtemetrie wat verkry is as gevolg van GNNS-posisionering sal vir etlike jare onakkuraat bly.
Digitale terreinmodel "DTM"
'n DTM is 'n digitale lêer wat uit roosters bestaan, elke rooster (vierkantige elementêre oppervlak) verskaf 'n hoogtewaarde vir die oppervlak van daardie rooster. 'n Idee van die huidige roostergrootte van die wêreldhoogtemodel is 30 m x 90 m. As u die posisie van 'n punt op die aarde (lengtegraad, breedtegraad) ken, is dit maklik om die hoogte van die plek te kry deur te lees die DTM-lêer (of DTM, Digital Terrain Model in Engels).
Die grootste nadeel van 'n DEM is sy betroubaarheid (afwykings, gate) en lêer akkuraatheid; Voorbeelde:
- Die ASTER DEM is beskikbaar met 'n stap (rooster of pixel) van 30 m, horisontale akkuraatheid van 30 m en 'n hoogtemeter van 20 m.
- Die MNT SRTM is beskikbaar vir 90 m spasiëring (rooster of pixel), ongeveer 16 m hoogtemeter en 60 m planimetriese akkuraatheid.
- Die Sonny DEM-model (Europa) is beskikbaar in 1°x1°-inkremente, dit wil sê met 'n selgrootte in die orde van 25 x 30 m, afhangend van breedtegraad. Die verkoper het die mees akkurate databronne saamgestel, hierdie DEM is relatief akkuraat en kan "maklik" gebruik word vir TwoNav en Garmin GPS via die gratis OpenmtbMap-kartering.
- IGN DEM 5m x 5m is gratis beskikbaar (vanaf Januarie 2021) in stappe van 1m x 1m of 5m x 5m met 1m vertikale resolusie. Toegang tot hierdie DEM word in hierdie gids verduidelik.
Moenie die resolusie (of die akkuraatheid van die data in die lêer) met die werklike akkuraatheid van daardie data verwar nie. Lesings (metings) kan verkry word van instrumente wat dit nie toelaat om die oppervlak van die aardbol tot die naaste meter waar te neem nie.
IGN DEM, gratis beskikbaar 🙏 vanaf Januarie 2021, is 'n lappieskombers van lesings (metings) wat met verskeie instrumente verkry word. Gebiede wat vir onlangse navorsing geskandeer is (bv. vloedrisiko) is teen 1 m resolusie geskandeer, elders kan die akkuraatheid baie ver van hierdie waarde wees. In die lêer is die data egter geïnterpoleer om die velde in inkremente van 5x5 m of 1x1 m in te vul. IGN het 'n hoë-resolusie-peilingsveldtog van stapel gestuur met die doel om Frankryk volledig te dek teen 2026, en op daardie dag sal IGN DEM akkuraat wees en gratis met intervalle van 1x1x1m. ...
Die DEM toon die hoogte van die grond: die hoogte van die infrastruktuur (geboue, brûe, heinings, ens.) word nie in ag geneem nie. In die woud is dit die hoogte van die aarde aan die voet van die bome, die oppervlak van die water is die oppervlak van die kus vir alle reservoirs groter as een hektaar.
Alle punte in 'n sel het dieselfde hoogte, dus aan die rand van die krans, as gevolg van die onsekerheid van die lêerligging, opgesom met die onsekerheid van die ligging, kan die onttrekte hoogte dieselfde wees as die naburige sel.
Die GPS-posisioneringsakkuraatheid onder ideale ontvangstoestande is in die orde van 4,5 m teen 90%. Hierdie prestasie word gesien met die mees onlangse GPS-ontvangers (GPS + Glonass + Galileo). Daarom is die akkuraatheid 90 keer uit 100 tussen 0 en 5 m (skoon lug, maskers uitgesluit, canyons uitgesluit, ens.) van die werklike ligging. die gebruik van 'n DEM met 'n 1 x 1 m-sel is teenproduktief.want die kanse om op die regte rooster te wees, sal skaars wees. Hierdie keuse sal die verwerker oorweldig met geen werklike toegevoegde waarde nie!

Om 'n DEM te kry wat gebruik kan word in:
- TwoNav GPS: CDEM op 5 m (RGEALTI).
Garmin GPS: Sonny-databasis
Leer hoe om jou eie DEM vir TwoNav GPS te skep. Vlakkurwes kan met behulp van Qgis-sagteware onttrek word.
Bepaal die hoogte met behulp van GPS
Een oplossing kan wees om die DEM-lêer in jou GPS-navigator te laai, maar die hoogte bo seespieël sal slegs betroubaar wees as die roosters in grootte verklein word en as die lêer akkuraat genoeg is (horisontaal en vertikaal).
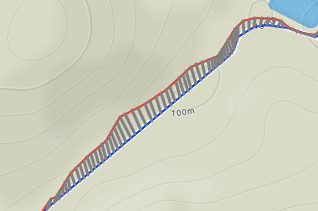
Om 'n goeie idee van die kwaliteit van die DEM te kry, is dit genoeg om byvoorbeeld die reliëf van 'n meer te visualiseer of 'n paadjie te bou wat die meer oorsteek en die hoogtes in 'n 2D-gedeelte waar te neem.

Beeld: LAND-sagteware, uitsig op Lake Gerardmer in 3D-vergroting x XNUMX met korrekte DEM. Die projeksie van maas op die terrein toon die huidige DEM-limiet.

Beeld: LAND-program, uitsig oor die Gérardmer-meer “BOG” in 2D met die korrekte DTM.
Alle moderne GPS-toestelle van "goeie gehalte" het 'n kompas en 'n digitale barometriese sensor, vandaar 'n barometriese hoogtemeter; Deur hierdie sensor te gebruik, kan jy 'n akkurate hoogte kry, mits jy die hoogte op 'n bekende punt stel (Garmin-aanbeveling).
Die hoogte-onakkuraatheid wat GPS sedert die koms van GPS verskaf het, het die ontwikkeling van hibridiseringsalgoritmes vir lugvaartkunde aangespoor wat barometerhoogte en GPS-hoogte gebruik om akkurate geografiese posisie te verskaf. hoogte. Dit is 'n betroubare hoogte-oplossing en die voorkeurkeuse van GPS-vervaardigers, geoptimaliseer vir buitelug-TwoNav-oefening. en Garmin.
By Garmin word die GPS-aanbieding volgens die gebruikersprofiel (buitelug, fietsry, bergfietsry, ens.) bekendgestel, daarom is dit belangrik om na die gebruikershandleidings en naverkoopdiens te verwys.
Die optimale oplossing is om jou GPS op die opsie te stel:
- Hoogte = Barometer + GPS, indien GPS dit toelaat,
- Hoogte = Barometer + DTM (MNT) as GPS dit toelaat.
In alle gevalle, vir 'n GPS wat met 'n barometer toegerus is, stel die barometer met die hand op sy minimum hoogte by die beginpunt. In die berge ⛰ op lang lopies sal die instelling oorgedoen moet word, veral in die geval van fluktuasies in temperatuur en weer.
Sommige Garmin GPS-geoptimaliseerde fietsrytoestelle stel die barometriese hoogte outomaties terug by bekende hoogte-wegpunte, wat 'n besonder slim oplossing vir bergfietsry is. Die gebruiker moet egter byvoorbeeld inlig voordat hy die hoogte van die passe en die bodem van die vallei verlaat; op pad terug sal die hoogteverskil akkuraat wees 👍.
In Barometer + (GPS of DTM)-modus sluit die vervaardiger 'n outomatiese barometeraanpassingsalgoritme in wat gebaseer is op die beginsel dat die styging wat deur die barometer, GPS of DEM gesien word konsekwent moet wees: hierdie beginsel bied groot buigsaamheid aan die gebruiker en is goed geskik vir buitemuurse aktiwiteite.
Die gebruiker moet egter bewus wees van die beperkings:
- Die GPS is gebaseer op die geoïde, dus as die gebruiker deur kunsmatige terrein beweeg (byvoorbeeld na slakhope), sal die regstellings verwring word,
- Die DEM wys die pad op die grond, indien die gebruiker 'n beduidende deel van die menslike infrastruktuur (viaduct, brug, voetgangerbrûe, tonnels, ens.) leen, sal die aanpassings verreken word.
Daarom is die optimale prosedure vir die verkryging van 'n akkurate hoogteverhoging soos volg:
1️⃣ Verstel die barometriese sensor aan die begin. Sonder hierdie instelling sal die hoogtes omgeskakel (verskuif word), die vlakverskil sal korrek wees as die drif weens weer klein is (kort roete buite die berge). Vir Garmin-familie GPS-gebruikers word “gpx”-hoogtes deur Garmin en Strava vir die gemeenskap gebruik, dus is dit verkieslik om die korrekte hoogteprofiel in die databasis in te voer.
2️⃣ Om die drif (fout in hoogte en hoogte bo seevlak) as gevolg van weerstoestande op lang reise (> 1 uur) en in die berge te verminder:
- Fokus op keuse Barometer + GPS, buite gebiede met kunsmatige reliëf (stortgebiede, kunsmatige heuwels, ens.),
- Fokus op keuse Barometer + DTM (MNT)as jy IGN DTM (5 x 5 m-rooster) of Sonny DTM (Frankryk of Europa) geïnstalleer het buite 'n roete wat 'n aansienlike hoeveelheid infrastruktuur gebruik (voetgangerbrûe, oorpaaie, ens.).
Ontwikkel 'n hoogteverskil
Die hoogteprobleem wat in die vorige reëls beskryf is, manifesteer hom meestal na waargeneem word dat die verskil in hoogte tussen die twee praktisyns verskil of wissel na gelang van of dit op GPS gelees word of in 'n toepassing soos STRAVA (sien STRAVA hulp) byvoorbeeld.
Eerstens moet jy jou GPS instel om die mees betroubare hoogte te verskaf.
Dit is redelik eenvoudig om die verskil in vlakke te kry deur die kaart te lees, dikwels is die praktisyn beperk tot die bepaling van die verskil tussen die punte van uiterste afmetings, alhoewel, om presies te wees, dit nodig is om die positiewe kontoerlyne te tel om die som te kry .
Daar is geen horisontale lyne in die digitale lêer nie, die GPS-sagteware, baanplottoepassing of ontledingsagteware is gekonfigureer om "trappe of hoogte-inkremente op te bou".
Dikwels kan "geen akkumulasie" gekonfigureer word:
- in TwoNav is die instellingsopsies algemeen vir alle GPS
- by Gamin moet u die gebruikershandleiding en naverkoopdiens raadpleeg (elke model het sy eie kenmerke volgens die tipiese gebruikersprofiel)
- die OpenTraveller-toepassing het 'n opsie wat voorstel dat die sensitiwiteitsdrempel aangepas word om die verskil in hoogte te bepaal.
Elkeen het sy eie oplossing 💡.
Webwerwe of sagteware vir aanlyn analise streef daarna om hoogte te vervang van "gpx" lêers met hul eie hoogte data.
Voorbeeld: STRAVA het 'n "inheemse" hoogtemetrie-lêer geskep wat geskep is met hoogtes wat afgelei is van spore afgelei van GPS bekend aan STRAVA en is toegerus met 'n barometriese sensor.Die aanvaarde oplossing veronderstel dat die GPS aan STRAVA bekend is, dus word dit op die oomblik hoofsaaklik uit die GARMIN-reeks verkry, en die betroubaarheid van die lêer aanvaar dat elke gebruiker gesorg het vir handmatige hoogteterugstelling .
Wat die praktiese implikasies betref, ontstaan die probleem veral tydens groepstaptogte, want elke deelnemer 🚵 kan agterkom dat hul hoogteverskil verskil van die vlak van ander deelnemers, afhangende van hul tipe GPS, of dit is 'n nuuskierige gebruiker wat nie verstaan nie waarom die verskil GPS-hoogte is, ontledingsagteware of STRAVA verskil.

In die perfek ontsmette STRAVA-wêreld behoort alle lede van die GPS GARMIN-gebruikersgroep in beginsel dieselfde hoogte op hul GPS en op hul STRAVA te sien. Dit is egter logies dat die verskil slegs deur die hoogteverstelling verklaar kan word niks bevestig dat die gerapporteerde hoogteverskil korrek is nie.
Dit is logies dat 'n lid van hierdie gebruikersgroep wat 'n GPS het wat nie aan STRAVA bekend is nie, dieselfde hoogteverskil op STRAVA as sy assistente moet sien, alhoewel die vlakverskil wat deur sy GPS vertoon word verskillend is. Hy kan sy toerusting blameer, wat nietemin reg werk.
Die naaste aan ware waarde van die verskil in hoogte word steeds in FRANKRIJK of BELGIË verkry wanneer die IGN-kaart gelees word., sal die ingebruikneming van 'n meer gevorderde geoïde die landmerk geleidelik na GNSS beweeg
GNSS: Geolokalisering en navigasie deur 'n satellietstelsel te gebruik: Bepaling van die posisie en spoed van 'n punt op die oppervlak of in die onmiddellike omgewing van die Aarde deur die verwerking van radioseine van verskeie kunsmatige satelliete wat op daardie punt ontvang is.
As jy op sagteware of 'n toepassing moet staatmaak om die hoogteverskil te kry, moet jy hierdie sagteware aanpas om die akkumulasiestapwaarde aan te pas volgens die kontoerlyne van die IGN-kaart van die terrein, dit wil sê 5 of 10 m. 'n Klein tree sal alle klein spronge of oorgange na stampe in 'n druppel verander, en omgekeerd, 'n tree te hoog sal die opkoms van klein heuwels uitvee.
Nadat hierdie aanbevelings toegepas is, toon die skrywer se eksperiment dat die hoogtewaardes wat verkry is met behulp van GPS of ontledingsagteware toegerus met 'n betroubare DEM binne die "korrekte" reeks bly, met die veronderstelling dat die IGN-kaart ook sy eie onsekerhede hetin vergelyking met die skatting verkry met die IGN-kaart 1 / 25.
Aan die ander kant word die waarde wat deur STRAVA gepubliseer word gewoonlik oorskat. Die metode wat STRAVA gebruik, gebaseer op die "terugvoer" van gebruikers, laat jou teoreties toe om 'n vinnige konvergensie te voorspel na waardes wat baie na aan die waarheid is, wat, afhangende van die aantal besoekers, reeds in BikePark moet plaasvind of baie besige spore!
Om hierdie punt konkreet te illustreer, is hier 'n ontleding van 'n spoor, wat lukraak geneem is, op 'n 20 km lange heuwelpad. Die "barometriese" GPS hoogte is gestel voor vertrek, dit verskaf die "Barometriese + GPS" hoogte, die DTM is 'n betroubare DTM wat herontwerp is om akkuraat te wees. Ons is buite die area waar STRAVA 'n betroubare hoogteprofiel kan hê.
Hierdie is 'n illustrasie van 'n baan waar die verskil tussen IGN en GPS die grootste is en die verskil tussen IGN en STRAVA die kleinste. die afstand tussen GPS en STRAVA is 80m, en die ware "IGN" is tussen hulle.
| Heights | ||||||
| depart | Aankoms | Max | min | die hoogte | Afwyking / IGN | |
| GPS (balk + GPS) | 122 | 124 | 150 | 98 | 198 | -30 |
| Hoogte verstelling op DTM | 122 | 122 | 150 | 98 | 198 | -30 |
| VOEDSEL | 280 | +51 | ||||
| IGN-kaarte | 122 | 122 | 148 | 99 | 228,5 | 0 |